


चे कार्य तत्वप्लॅनेटरी रोलर स्क्रूआहे: जुळणारी मोटर स्क्रूला फिरवण्यासाठी चालवते आणि मेशिंग रोलर्सद्वारे, मोटरची फिरणारी गती नटच्या रेषीय परस्पर गतीमध्ये रूपांतरित होते. प्लॅनेटरी रोलर स्क्रू सर्पिल गती आणि ग्रहीय गती एकत्र करतो, जो उच्च कार्यक्षमता आवश्यकता असलेल्या व्यापक परिस्थितींसाठी अतिशय योग्य आहे.
प्लॅनेटरी रोलर स्क्रू आकृतीमध्ये दाखवला आहे. त्याचे मुख्य घटक आहेत:
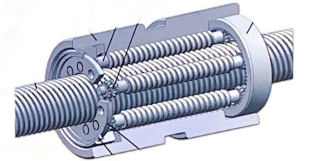
स्क्रू, त्याचा थ्रेड प्रोफाइल काटकोन त्रिकोण आहे (३ हेड आणि त्याहून अधिक असलेले थ्रेड)
नट, त्याचे अंतर्गत थ्रेड प्रोफाइल स्क्रूसारखेच आहे.
रोलर, सिंगल-स्टार्ट थ्रेड, प्रत्येक रोलरच्या शेवटी एक दंडगोलाकार पिव्होट आणि बॅफलच्या गोल छिद्रात एक गियर पिव्होट बसवलेला असतो जेणेकरून रोलर्स रेडियल दिशेने समान रीतीने वितरित केले जातील. गियरचे दात अंतर्गत रिंग गियरशी जोडलेले असतात, ज्यामुळे रोलर सहजतेने पुढे जाऊ शकतो.
Rएटेनिंग रिंग,बॅफल लॉक करणे.
फ्लॅट कीचालित वस्तू जोडण्यासाठी वापरला जातो. त्याची रचना सोपी आहे, ती वेगळे करणे आणि एकत्र करणे सोपे आहे आणि त्यात चांगले हेजिंग गुणधर्म आहेत. हे उच्च गती, परिवर्तनशील भार आणि आघात परिस्थितींसाठी योग्य आहे.
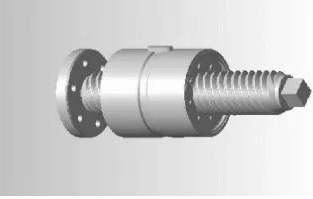
रिव्हर्स प्लॅनेटरी रोलर स्क्रू, ज्याला रिव्हर्स रोलर स्क्रू आणि रिव्हर्स प्लॅनेटरी रोलर स्क्रू असेही म्हणतात, हे एका रेषीय ट्रान्समिशन उपकरणाचा संदर्भ देते ज्यामध्ये रोलरची व्यवस्था किंवा हालचाल दिशा पारंपारिक प्लॅनेटरी रोलर स्क्रूच्या विरुद्ध असते.
रिव्हर्स प्लॅनेटरी रोलर स्क्रूचा आकार लहान आणि भार मोठा असतो. फ्रेमलेस मोटरसह, ते ह्युमनॉइड रोबोट हात, पाय, कंबर सांधे इत्यादींसाठी वापरले जाऊ शकते.
मानक प्लॅनेटरी रोलर स्क्रूमध्ये उच्च गती, मजबूत भार सहन करण्याची क्षमता आणि उच्च अचूकता हे फायदे आहेत. प्रभावी स्ट्रोक एक मीटरपेक्षा जास्त पोहोचू शकतो, ज्यामुळे ते अत्यंत जड भार वातावरणासाठी अतिशय योग्य बनतात.
स्क्रू नवीन रिलीज पॉइंटसाठी ह्युमनॉइड रोबोट. ट्रॅपेझॉइडल स्क्रू आणिबॉल स्क्रूमेकॅनिकल मशीन टूल्सच्या क्षेत्रात परिपक्व अनुप्रयोग झाला आहे, प्लॅनेटरी रोलर स्क्रू सध्या फक्त विमानचालन आणि इतर उच्च-अंत अनुप्रयोगांमध्ये आहे. टेस्ला ह्युमनॉइड मशीन १४ रेषीय की ८-१० रोलर स्क्रू वापरेल.
पोस्ट वेळ: डिसेंबर-०६-२०२४




