

तत्वस्क्रू स्टेपर मोटर: स्क्रू आणि नटचा वापर गुंतवण्यासाठी केला जातो आणि स्क्रू आणि नट एकमेकांच्या सापेक्ष फिरण्यापासून रोखण्यासाठी एक स्थिर नट घेतला जातो, ज्यामुळे स्क्रू अक्षीयपणे हलू शकतो. सर्वसाधारणपणे, हे परिवर्तन साकार करण्याचे दोन मार्ग आहेत.
पहिले म्हणजे मोटरमध्ये अंतर्गत धाग्यांसह रोटर तयार करणे आणि ते प्रत्यक्षात आणणेरेषीय गतीरोटर आणि स्क्रूच्या अंतर्गत धाग्यांना जोडून, ज्याला पेनिट्रेटिंग स्क्रू स्टेपिंग मोटर म्हणतात. (नट मोटर रोटरशी जोडलेला असतो आणि स्क्रू शाफ्ट मोटर रोटरच्या मध्यभागी जातो. वापरात असताना, स्क्रू दुरुस्त करा आणि अँटी-रोटेशन करा, जेव्हा मोटर चालू होते आणि रोटर फिरतो, तेव्हा मोटर स्क्रूच्या बाजूने रेषीयपणे फिरेल. (उलट, जर स्क्रू अँटी-रोटेशन करताना मोटर स्थिर असेल, तर स्क्रू रेषीय गती करेल)
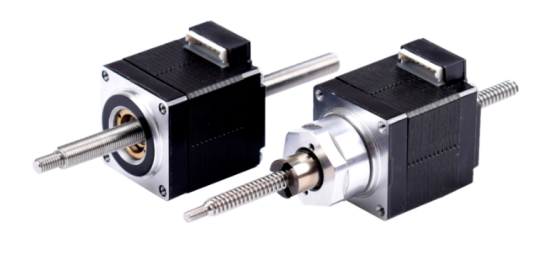
थ्रू-अक्ष प्रकार
दुसरे म्हणजे घेणेस्क्रूमोटर आउट शाफ्ट म्हणून, मोटरमध्ये बाह्य ड्राइव्ह नट आणि स्क्रू एंगेजमेंटद्वारे रेषीय हालचाल साध्य करण्यासाठी, ही बाह्य ड्राइव्ह प्रकारची स्क्रू स्टेपिंग मोटर आहे. याचा परिणाम म्हणजे एक अतिशय सरलीकृत डिझाइन आहे जी अनेक अनुप्रयोगांमध्ये बाह्य यांत्रिक लिंकेज स्थापित न करता थेट स्क्रू स्टेपर मोटरसह अचूक रेषीय हालचाल करण्यास सक्षम करते. (नट मोटरच्या बाहेर आहे आणि ड्राइव्ह यंत्रणेशी जोडलेला आहे. जेव्हा मोटर फिरते तेव्हा नट स्क्रूच्या बाजूने रेषीयपणे फिरतो.)
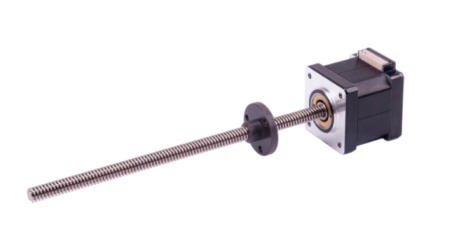
बाह्य ड्राइव्ह प्रकार
थ्रू-अक्ष रेषीय स्टेपिंग मोटरचे अनुप्रयोग फायदे:
बाह्यरित्या चालविलेल्या रेषीय स्टेपर मोटर्सचा वापर वापरल्या जाणाऱ्या अनुप्रयोग परिस्थितींची तुलना करणेरेषीय मार्गदर्शक मार्ग, थ्रू-अक्ष रेषीय स्टेपर मोटर्सचे स्वतःचे अनन्य फायदे आहेत, जे प्रामुख्याने खालील 3 पैलूंमध्ये प्रतिबिंबित होतात:
1.अधिक सिस्टम इंस्टॉलेशन त्रुटींना अनुमती देते:
सर्वसाधारणपणे, जर बाह्यरित्या चालित रेषीय स्टेपर मोटर वापरली गेली, तर स्क्रू आणि मार्गदर्शक मार्गाच्या माउंटिंगमधील खराब समांतरतेमुळे सिस्टम स्टॉल होण्याची शक्यता असते. तथापि, थ्रू-अक्ष रेषीय स्टेपर मोटर्ससह, डिझाइनच्या संरचनात्मक वैशिष्ट्यांमुळे ही घातक समस्या मोठ्या प्रमाणात कमी केली जाऊ शकते, ज्यामुळे मोठ्या प्रमाणात सिस्टम त्रुटी निर्माण होतात.
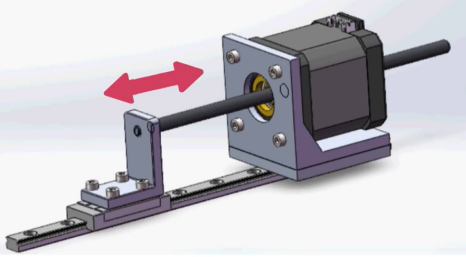
जेव्हा मोटरला ऊर्जा मिळते, तेव्हा नट रोटरसह फिरतो आणि स्क्रू बाह्य भाराशी जोडलेला असतो आणि मार्गदर्शकाच्या बाजूने सरळ रेषेत फिरतो.
2.स्क्रूच्या गंभीर गतीने मर्यादित नाही:
जेव्हा बाह्यरित्या चालविलेल्या रेषीय स्टेपर मोटर्स हाय-स्पीड रेषीय गतीसाठी निवडल्या जातात, तेव्हा त्या सहसा स्क्रूच्या क्रिटिकल स्पीडने मर्यादित असतात. तथापि, थ्रू-अॅक्सिस रेषीय स्टेपर मोटरसह, स्क्रू स्थिर आणि अँटी-रोटेशन असतो, ज्यामुळे मोटर रेषीय मार्गदर्शक मार्गाचा स्लाइडर चालवू शकते. स्क्रू स्थिर असल्याने, उच्च गती प्राप्त करताना ते स्क्रूच्या क्रिटिकल स्पीडने मर्यादित नसते.
3.हे स्थापनेची जागा वाचवते:
थ्रू-अॅक्सिस लिनियर स्टेपिंग मोटर स्क्रूच्या लांबीपेक्षा जास्त जागा घेत नाही कारण स्ट्रक्चरल डिझाइनमध्ये नट बांधला जातो. एकाच स्क्रूवर अनेक मोटर्स बसवता येतात. मोटर्स एकमेकांमधून "पास" होऊ शकत नाहीत, परंतु त्यांच्या हालचाली एकमेकांपासून स्वतंत्र असतात. म्हणूनच, अधिक कठोर जागेच्या आवश्यकता असलेल्या अनुप्रयोगांसाठी हा एक योग्य पर्याय आहे.
अधिक माहितीसाठी, कृपया आमच्याशी येथे संपर्क साधाamanda@kgg-robot.comकिंवा+डब्ल्यूए००८६ १५२२१५७८४१०.
पोस्ट वेळ: फेब्रुवारी-११-२०२५




